Brick Geometries: 5-Axis Additive Manufacturing for Architecture

Historically associated with craft-based manufacturing or high-volume industrial production, architectural ceramics and innovative brick structures are typically developed from a limited selection of building components manufactured on sets of already made or custom fabricated machines, dies and/or fixtures. In this light, 3D printing technologies offer architectural designers a break from well established manufacturing practices and the geometric limits of historical production methods. However, many of the manufacturing details for 3D printed ceramics are unknown and unpublished; 3D printed ceramics have their own inherent set of geometric limits. This thesis research compiles multiple open-source frameworks and proposes a novel approach to the geometries embedded within 3D printed ceramic building components specifically fabricated by a 3 & 5-axis Fused Deposition Modeling (FDM) printer. The investigation using Multi-Axis Additive Manufacturing (MAAM) as a function to rethink geometric form for architectural building components.
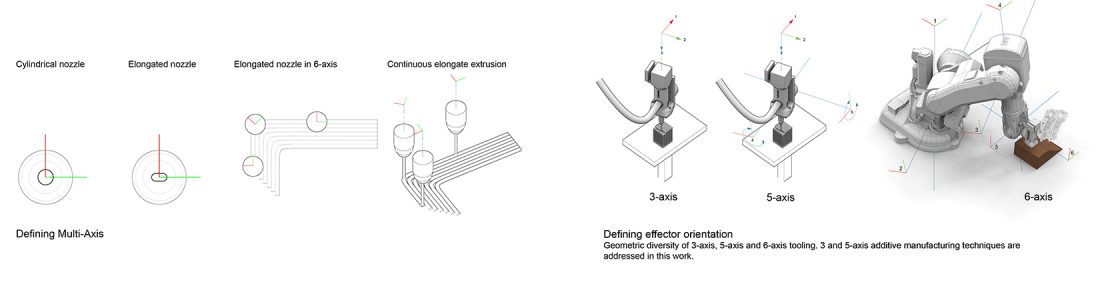
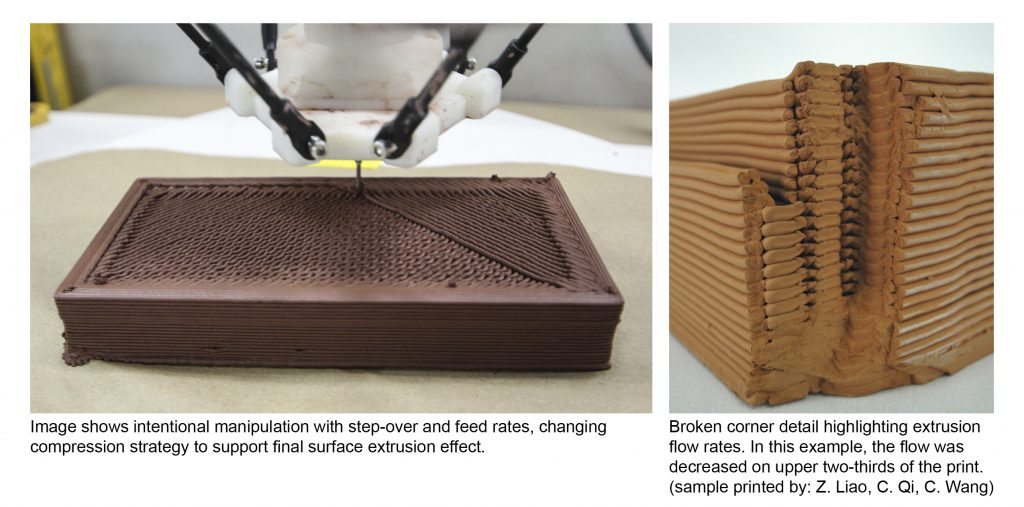
Material research helped develop protocols for effective tooling strategies and identify restraints of potential designs for 5-axis printing with an existing 6-axis Industrial Robotic arm (IR) [i] [ii] [iii] [iv]. Results include architectural effects such as the inclusion of folding, coiling and meandering viscous threads as well as the variable tooling structures between sequentially bonded deposition layers [v] [vi]. These strategies exposed unique design opportunities for architectural affect, modified structural characteristics and facilitate the manipulation of thermal exchange within the ceramic mass.
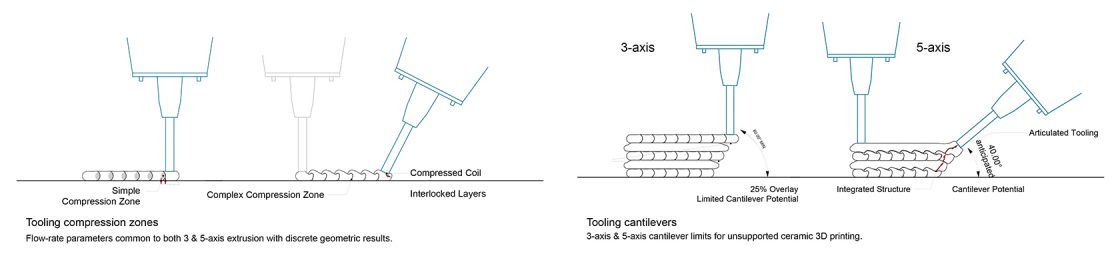
This research proposes certain advantages for 5-axis (as well as 3-axis) tooling to be developed for use on multiple IR platforms. Multi-axis extrusion creates certain opportunities for an integrated structure between fused layers. The complex layers influence design potential by radically increasing the range of printable geometries due to its effect on the adhesion between layers. Cantilevers as low as 40º are anticipated with an articulated extrusion head but the clay body, surface geometry and print speeds will each affect actual results. Print speeds up to 30mm / sec were proven with the current setup but again, part geometry, surface affect and modifiable machine parameters make this a wide ranging variable; print speeds can be much higher.
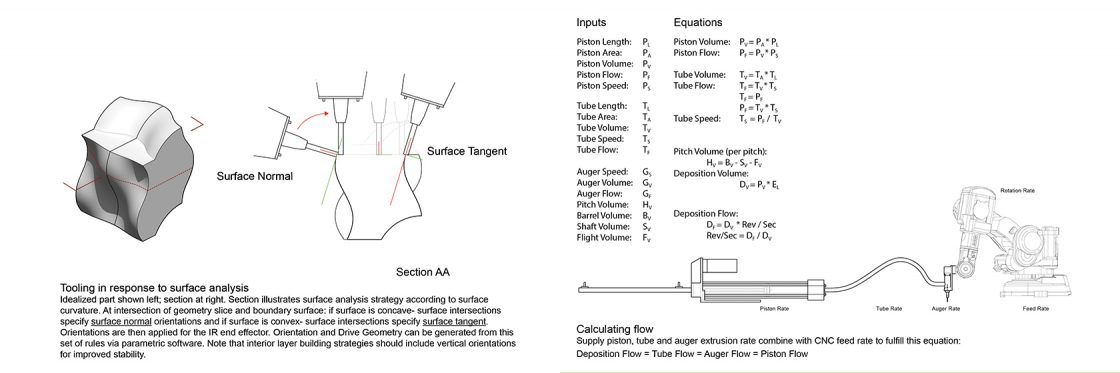
Whereas this work proposes strategies for surface analysis, future research could include refining the multi-axis tooling workflow for Rapid Code generation and further integration into existing software’s developed for other MAAM production applications. Integration of the mathematics organizing discrete viscus threads with the generation of tooling geometries will generate predictable surface textures for architectural affect (see reference v & vi). More opportunities exist by completing structural analysis tests to characterize the changes of load bearing capacities between 3 & 5-axis printed geometries. Future development between the machines and material science will integrate the flow rates of clay bodies to be deployed in the production environment of ceramic manufacturing facilities; there are few problems left to solve before 3D printed architecture becomes widely available.
This research led to an architectural proposal for completion of the Thesis in Architecture. Information gathered from experiments established manufacturing limitations which were then combined with a structural proposal to formulate a design boundary for a set of dome-like structures. The structural concept was simple, and one that can convincingly be built from 3D printed ceramic building components designed while keeping it mind the fabrication parameters uncovered during the research.
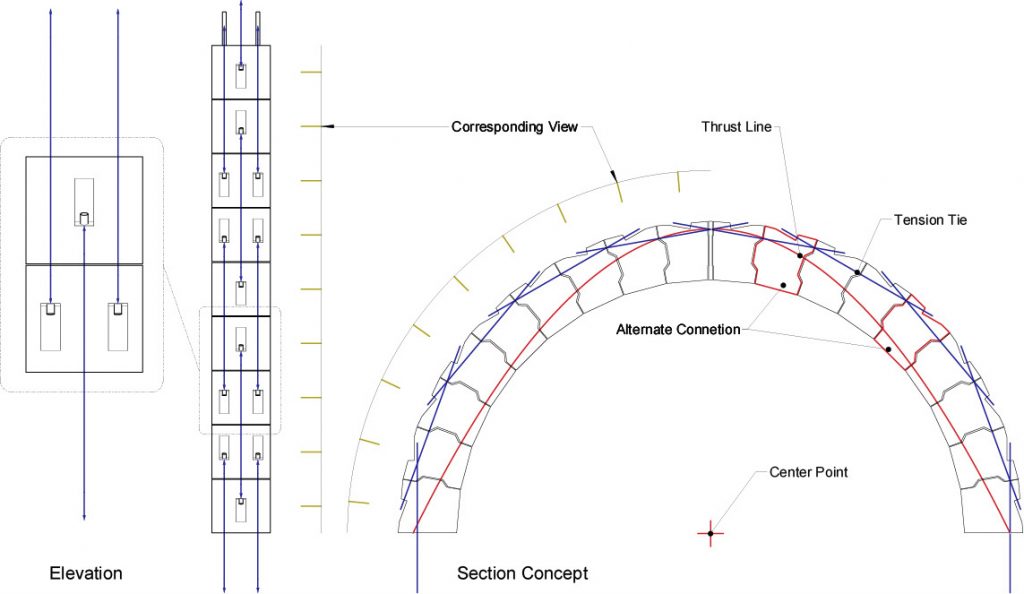
The structural concept uses 3D printed blocks to form a series semi-circular arch elements, spanned by 3D printed centenary vault elements. Each voussoir has a designed set of slots and holes to receive post-tensioning elements, tying each arch to its foundation. Alternating sets of bricks are tied together, segmenting the arch with straight tensioned elements, while overlapping to connect the system as a whole.
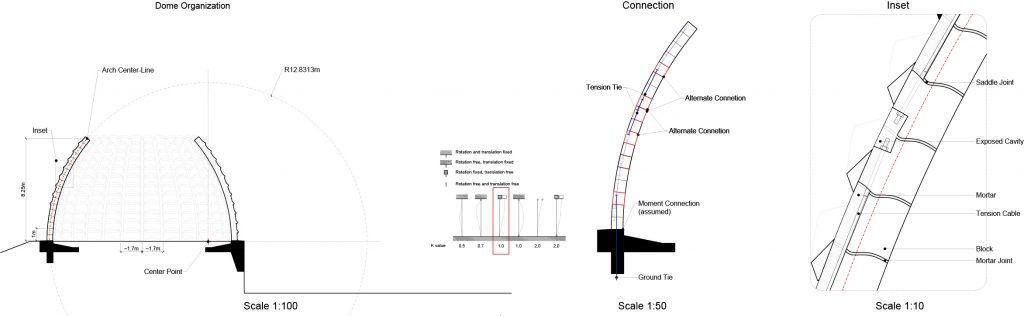
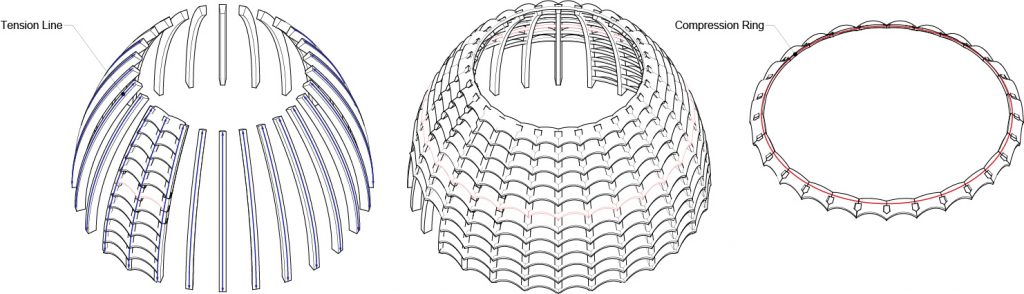
Arch elements support the semi-domed structure. Enclosure elements, in this case catenary vaults, enclose the space and provide lateral support as a series of compression rings adding to overall stability.
Conceptualized renderings were produced to visualize the architectural potential of the system proposal.


Architecture Thesis Student: Kevin Hinz
Special Thanks to: Prof. Martin Bechthold, Research Sponsor, Leire Asensio Villoria, Thesis Advisor.
Fabrication Support: Brian Czibesz, Joelle Bitton, Jessica Brandl, Tom Blough, Jonathan Grinham, Harvard GSD Code Without Frontiers, Harvard GSD Fabrication Lab Staff, Nathan Melenbrink, Daekwon Park.
Diagrams, Drawings and Photographs by: Author
Renderings by: Brandon Johnson
[i] Keep, Jonathan.
[ii] Marlin Firmware.
[iii] World’s Advanced Saving Project (WASP).
[iv] Händle, Frank. Extrusion in Ceramics. Berlin: Springer, 2007.
[v] Bergou, Miklo ́s, Basile Audoly, Etienne Vouga, Max Wardetzky, and Eitan Grinspun. “Discrete Viscous Threads.” In ACM SIGGRAPH 2010 Papers July 26-30, 2010, Los Angeles, California, 1-10. Proceedings. New York, NY: ACM, (2010).
[vi] Morris, Stephen W., Jonathan H. P. Dawes, Neil M. Ribe, and John R. Lister. “Meandering Instability of a Viscous Thread.” Physical Review E Phys. Rev. E 77, no. 6 (2008).