Robotic Spatial Printing at Rob|Arch 2024



Sulaiman Alothman, Hanspeter Pfister, and Martin Bechthold will be presenting their paper, Toolpath Design Calibration for Robotic Spatial Printing with Supervised Learning in the upcoming Rob | Arch 2024!
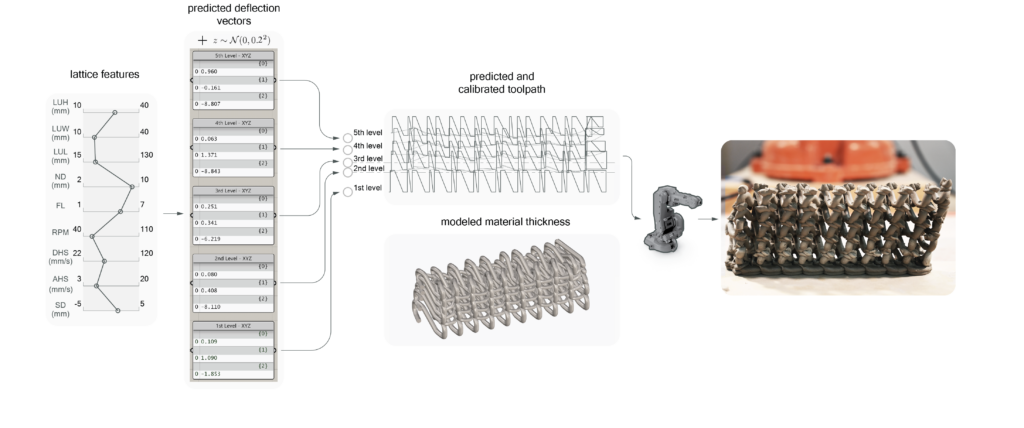
“The paper describes a novel method using neural networks to predict and calibrate the toolpath geometries in extrusion 3D printing of natural materials, addressing the challenges of controlling the nonlinear behavior of these materials. Focusing on clay lattice printing, an unorthodox extrusion scenario, the presented method has demonstrated improved accuracy in manufacturing, offering a promising sustainable alternative for contemporary construction.”
Alothman, S.; Pfister, H. & Bechthold, M: “Toolpath Design Calibration for Robotic Spatial Printing with Supervised Learning” in Robotic Fabrication in Architecture, Art and Design (Rob|Arch), 2024.